Vibrazioni longitudinali. Problemi moderni della scienza e dell'educazione
MECCANICA
UDC 531.01/534.112
VIBRAZIONI LONGITUDINALI DI UN PACCO DI ASTE
SONO. Pavlov, A.N. Temnov
MSTU im. NE Bauman, Mosca, Federazione Russa e-mail: [e-mail protetta]; [e-mail protetta]
In materia di dinamica dei razzi a propellente liquido, un ruolo importante è giocato dal problema della stabilità del movimento del razzo quando si verificano oscillazioni elastiche longitudinali. La comparsa di tali oscillazioni può portare alla creazione di auto-oscillazioni che, se il razzo è instabile nella direzione longitudinale, possono portare alla sua rapida distruzione. Viene formulato il problema delle oscillazioni longitudinali di un razzo a pacco; come modello di calcolo viene utilizzato un pacco di aste. È accettato che il liquido nei serbatoi dei razzi sia "congelato", cioè i movimenti propri del fluido non vengono presi in considerazione. Viene formulata la legge del bilancio energetico totale per il problema in esame e viene fornita la sua formulazione dell'operatore. Viene fornito un esempio numerico, per il quale vengono determinate le frequenze e vengono costruite e analizzate le forme delle oscillazioni naturali.
Parole chiave: vibrazioni longitudinali, frequenza e forma delle vibrazioni, pacchetto di aste, legge del bilancio energetico totale, operatore autoaggiunto, spettro vibrazionale, POGO.
SISTEMA DI ASTE VIBRAZIONI LONGITUDINALI A.M. Pavlov, AL. Temnov
Bauman Mosca State Technical University, Mosca, Federazione Russa e-mail: [e-mail protetta]; [e-mail protetta]
Nelle questioni relative alla dinamica dei razzi a combustibile liquido, il problema della stabilità del movimento di questo razzo ha un ruolo importante con la comparsa di vibrazioni elastiche longitudinali. Il verificarsi di vibrazioni di questo tipo può evocare vibrazioni proprie che possono causare una rapida distruzione del razzo in caso di instabilità del razzo nella direzione longitudinale. Il problema delle vibrazioni longitudinali del razzo a combustibile liquido basato sullo schema a pacchetto è stato formulato utilizzando le aste a pacchetto come modello computazionale. Si presuppone che il liquido nei serbatoi dei razzi sia "congelato", ad es. non sono compresi i moti propri del liquido. Per questo problema è stato formulato il principio di conservazione dell'energia e viene fornita la sua suddivisione in operatori. Esiste un esempio numerico, per il quale sono state determinate le frequenze, sono state costruite e analizzate le forme di vibrazione Eigen.
Parole chiave: vibrazioni longitudinali, modi propri e frequenze, modello ad aste, principio di conservazione dell'energia, operatore auto-giunto, spettro di vibrazione, POGO.
Introduzione. Attualmente, in Russia e all'estero, per lanciare un carico utile nell'orbita richiesta vengono spesso utilizzati veicoli di lancio con un layout a pacchetto con blocchi laterali identici distribuiti uniformemente attorno al blocco centrale.
Gli studi sulle vibrazioni delle strutture dei pacchi incontrano alcune difficoltà legate all'effetto dinamico dei blocchi laterali e centrali. Nel caso della simmetria del layout del veicolo di lancio, la complessa interazione spaziale dei blocchi del design del pacchetto può essere suddivisa in un numero finito di tipi di vibrazioni, uno dei quali sono le vibrazioni longitudinali dei blocchi centrali e laterali. Un modello matematico delle vibrazioni longitudinali di una tale struttura sotto forma di un pacchetto di aste a pareti sottili viene discusso in dettaglio nel lavoro. Riso. 1. Schema della centrale - Questo articolo presenta l'asta teorica e i risultati computazionali della longitudinale
vibrazioni di un pacchetto di aste, integrando lo studio effettuato da A.A. Pietà.
Formulazione del problema. Consideriamo altre vibrazioni longitudinali di un pacco di aste costituito da un'asta centrale di lunghezza l0 e N aste laterali della stessa lunghezza j = l, (l0 > lj), j = 1, 2,..., N, fissate nel punto A (xA = l) (Fig. 1) con elementi elastici centrali di rigidezza k.
Introduciamo un sistema di riferimento fisso OX e assumiamo che la rigidità delle aste EFj (x), la massa distribuita mj (x) e il disturbo q (x,t) siano funzioni limitate della coordinata x:
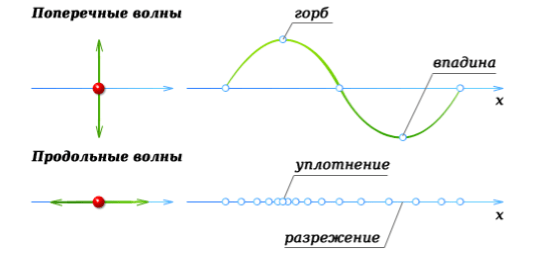
0 0 < mj < mj (x) < Mj; (1) 0 Supponiamo che, durante le vibrazioni longitudinali, si verifichino spostamenti Uj (x, t) in sezioni di aste di coordinata x, determinate dalle equazioni mj (x) ^ - ¿(eFj (x) ^ = qj (x,t), j = 0,1, 2,..., N, (2) condizioni al contorno per l'assenza di forze normali alle estremità delle aste 3 =0, x = 0, ^ = 1, 2, 0, x = 0, x = l0; condizioni di uguaglianza delle forze normali che si verificano nelle aste, EF-3 = Fx = l forze elastiche degli elementi elastici FпPJ = к (ш (ха) - у (¡,)); (4) EUodX (xa - 0) - EFodX (xa + 0) = , x = xa; condizione di uguaglianza degli spostamenti nel punto xa dell'asta centrale Shch (ha-o) = Shch (xa+o) e condizioni iniziali Shch y (x, 0) - Shch (x); , _ u(x, 0) = u(x), dove u(x, 0) = "d^1(x, 0). Legge del bilancio energetico totale. Moltiplichiamo l'equazione (2) per u(x,ξ), integriamo sulla lunghezza di ciascuna asta e sommiamo i risultati utilizzando le condizioni al contorno (3) e la condizione di corrispondenza (4). Di conseguenza otteniamo (( 1 ^ [ (diL 2 TZ (x) "BT" (x+ dt | 2 ^ J 3 w V dt N x „ h 2 .. N „ i. 1 ^ Ã „„ , f dп3\ , 1 ^ Ãj 1 N /* i dpl 2 1 N fl j EF3 dx +2^Уо È (x - -)(no - Uj)2 dx = / ^ (x, £) loro y (x, £) (x, (6) dove 8 (x - ¡y) è la funzione delta di Dirac. Nell'equazione (6), il primo termine tra parentesi graffe rappresenta l'energia cinetica T (¿) del sistema, il secondo è l'energia potenziale Pr (£), causata dalla deformazione delle aste, e il terzo è l'energia potenziale Pk (£) degli elementi elastici, che in presenza di deformazioni elastiche aste può essere scritto nella forma Pk (*) = 2 £ / Cy (¡y) 8 (x - ¡1) E^ (¡y) (ddit (¡1)) 2 (x, Cy = Eu. L'equazione (6) mostra che la variazione dell'energia totale per unità di tempo del sistema meccanico in esame è uguale alla potenza influenza esterna. In assenza di disturbi esterni q (x,t), si ottiene la legge di conservazione dell'energia totale: T (t) + Pr (t) + Pk (t) = T (0) + Pr (0) + Pk (0). Cinematografia. La legge del bilancio energetico mostra che per ogni tempo t le funzioni Uj (x, t) possono essere considerate come elementi dello spazio di Hilbert L2j(; m3 (x)), definito sulla lunghezza ¡i dal prodotto scalare (us,Vk)j = J mj (x) usVkdx 0 e la norma corrispondente. Introduciamo lo spazio di Hilbert H uguale alla somma ortogonale L2j, H = L20 Ф L21 Ф... Ф L2N, la funzione vettoriale U = (uo, Ui,...,uN)т e l'operatore A agente nella spazio H secondo la relazione AU = diag (A00U0, A11U1,..., Annun). mj(x)dx\jdx" operatori definiti su impostare B (A33) á Í di funzioni che soddisfano le condizioni (3) e (4). Il problema originale (1)-(5) insieme alle condizioni iniziali verranno scritti nel modulo Au = f (*), u (0) = u0, 17(0) = u1, (7) dove f (*) = (a (*),51 (*),..., Yam (¿))t. Lemma. 1. Se le prime due condizioni (1) sono soddisfatte, allora l'operatore A nel problema dell'evoluzione (7) è un operatore illimitato, autoaggiunto e definito positivo nello spazio H (Au,K)n = (u,AK)n, (Au, u)i > c2 (i, u)i. 2. L'operatore A genera uno spazio energetico NA con norma pari al doppio dell'energia potenziale delle oscillazioni di un pacco di aste 3\^I h)2 = 2П > 0. (8) IIUIIA = £/ EF^^J dx + k £ (uo - U)2 = 2П > 0. < Оператор А неограничен в пространстве Н, поскольку неограничен каждый диагональный элемент А33. Самосопряженность и положительная определенность оператора А проверяются непосредственно: (AU, v)h =/m (x) (-^| (EFo (x) ^j) Vo (x) dx+ +£ jm(x) (- jx) | (ef- (x) dndxa))v-(x) dx=... = EFo (x) uo (x) vo (x) dx - EFo (x) U) (x) vo (x) J EFo (x) uo (x) vo (x) dx - EFo (x) uo (x) ?o (x) + ^^ / MI- (x) u- (x) vo (x) dx - ^^ MI- (x) u- (x) v- (x) J EFo (x) uo (x) v" (x) dx - EFo (xa - 0) uo (xa - 0) vo (xa) + 0 EFo (xa + 0) uo (xa + 0) vo (xa) - £ EF- (/-) u- (/-) v- (/-) + J EF- (x) u- (x) v- (x) dx = J EFo (x) uo (x) vo (x) dx+ -=100 + £ / EF.,- (x) u- (x) g?- (x) dx+ o O(xa)- £ MI- (/-) u- (/-) v?"- (/-) = MI Fo (x) uo (x) v?"o (x) dx+ -=10 + £ / EF- (x) u- (x) v- (x) dx+ -=1 0 - + £ k (uo (xa) - u- (/-)) (vo (xa) - v- (/-)) = (U, A?)H (AU, U)H = ... = I EF0 (x) u"2 (x) dx - EF0 (x) u0 (x) u0 (x) J EF0 (x) u"0 (x) dx - EF0 (x) u0 (x) u0 (x) + ^^ / EFj (x) u"2 (x) dx - ^^ EFj (x) uj (x) u3 (x) "J EF°(x) u"2 (x) dx 4EF0 (x) u"2 (x) dx+£ JEFj (x) u"2 (x) dx У^ k (u0 (l) uj (l) - u2 (/)) + u0 (l) ^ k (u0 (l) - uj (l)) = EF0 (x) u"2 (x) dx + / EF0 (x) u"0 (x) dx + S / EFj (x) u"2 (x) dx + k ^ (u0 (l) - uj (l))2 > c2 (U, U)H Dai risultati di cui sopra ne consegue che la norma energetica dell'operatore A è espressa dalla formula (8). Risolubilità del problema evolutivo. Formuliamo il seguente teorema. Teorema 1. Siano soddisfatte le condizioni U0 £ D (A1/2) , U0 £ H, f (t) £ C (; H), allora il problema (7) ha un'unica soluzione debole U (t) sull'intervallo, definito dalla formula U (t) = U0 cos (tA1/2) +U1 sin (tA1/2) +/sen ((t - s) A1/2) A-1/2f (s) ds. 5 in assenza di disturbi esterni f (£), la legge di conservazione dell'energia è soddisfatta 1 II A 1/2UÈ2 = 1 1 II A1/2U 0|H. < Эволюционная задача (7) - это стандартная задача Коши для дифференциального операторного уравнения гиперболического типа, для которого выполнены все условия теоремы о разрешимости . Vibrazioni naturali di un pacchetto di canne. Supponiamo che il sistema di aste non sia influenzato dal campo di forze esterne: f (t) = 0. In questo caso i movimenti delle aste si diranno liberi. I movimenti liberi delle aste, dipendenti dal tempo t secondo la legge exp (iwt), saranno chiamati vibrazioni naturali. Prendendo U (x, t) = U (x) eiWÍ nell'equazione (7), otteniamo il problema spettrale per l'operatore A: AU - AEU = 0, L = w2. (9) Le proprietà dell'operatore A ci permettono di formulare un teorema sullo spettro e sulle proprietà delle autofunzioni. Teorema 2. Il problema spettrale (9) sulle vibrazioni naturali di un pacchetto di bacchette ha uno spettro positivo discreto 0 < Ai < Л2 < ... < Ak < ..., Ak ^ то ed un sistema di autofunzioni (Uk (x))^=0, completo ed ortogonale negli spazi H e HA, e sono soddisfatte le seguenti formule di ortogonalità: (Ufe, Us)H = £ m (xj UfejMSjdx = j=0 0 (Regno Unito= £/T^) d*+ K (“feo - Mfej) (uso -) = Afeífes. j=i Studio del problema spettrale nel caso di un pacchetto omogeneo di bacchette. Presentando la funzione spostamento m- (x, £) nella forma m- (x, £) = m- (x), dopo aver separato le variabili otteniamo problemi spettrali per ciascuna asta: ^Oi + Lm = 0, ^ = 0,1,2,..., N (10) che scriviamo in forma matriciale 4 £ + Li = 0, A = -,-,-,...,- \ t0 t1 t2 t « u = (u0, u1, u2,..., u«)t. Soluzione e analisi dei risultati ottenuti. Indichiamo le funzioni di spostamento per l'asta centrale nella sezione come u01 e nella sezione come u02 (g). In questo caso, per la funzione u02 spostiamo l'origine delle coordinate nel punto con coordinata /. Per ciascuna asta presentiamo la soluzione dell'equazione (10) nel modulo Per trovare le costanti sconosciute nella (11), utilizziamo le condizioni al contorno formulate sopra. Da condizioni al contorno omogenee è possibile determinare alcune costanti, vale a dire: C02 = C12 = C22 = C32 = C42 = ... = CN 2 = 0. Rimangono quindi da trovare N+3 costanti: C01, C03, C04, C11, C21, C31, C41,..., CN1. Per fare ciò, risolviamo N+3 equazioni per N+3 incognite. Scriviamo il sistema risultante in forma matriciale: (A) (C) = (0) . Qui (C) = (C01, C03, C04, C11, C21, C31, C41,..., Cn 1)t è il vettore delle incognite; (A) - matrice caratteristica, cos (A1) EF0 A sin (A1) + L sin (L (Zo - 1)) L cos (L (Zo - 1)) 0 00 0 \ -1 0 0000 0 anni 00 00 0 000 anni a = k soe ^ ^A-L^ ; in = -k co8((.40-01L)1/2 ^ ; 7 = (A4"-1 l) 1/2 ap ((A"1l) 1/2 + k sov ((A"1l) 1/2; (~ \ 1/2 ~ Û= ^Û] ; A--: 3 = 0. Per trovare una soluzione non banale prendiamo come variabile la costante C01 € M. Abbiamo due opzioni: C01 = 0; C01 = 0. Sia C01 = 0, allora C03 = C04 = 0. In questo caso, una soluzione non banale può essere ottenuta se 7 = 0 da (12) quando è soddisfatta la condizione aggiuntiva £ s-1 = 0, (13) che si ottiene dalla terza equazione del sistema (12). Di conseguenza, otteniamo una semplice equazione di frequenza EP (A"1 L)1/2 W ((A"1^1/2 P + zz\Vzz K cos ^ (A-/a) 1/2 ^ = 0, j SOL , coincidente con l'equazione della frequenza per un'asta fissata elasticamente ad un'estremità, che può essere considerata come il primo sistema parziale. In questo caso, tutte le possibili combinazioni di movimenti delle aste laterali che soddisfano la condizione (13) possono essere condizionatamente suddivise in gruppi corrispondenti a diverse combinazioni di fasi (nel caso in esame, la fase è determinata dal segno C.d). Se assumiamo che le aste laterali siano identiche, allora abbiamo due opzioni: 1) Сд = 0, quindi il numero di tali combinazioni n per N diversi può essere calcolato utilizzando la formula n = N 2, dove è la funzione di divisione senza resto; 2) qualsiasi (o qualsiasi) delle costanti C- è uguale a 0, quindi il numero di combinazioni possibili aumenta e può essere determinato dalla formula £ [(N - m) div 2]. Sia Coi = 0, allora Cn = C21 = C31 = C41 = ... = CN1 = = C01 (-v/t), dove in e y sono i complessi inclusi nella (12). Dal sistema (12) si ha inoltre: C03 = C01 cos (А/); C04=C03 tg (L (/0 - /)) = C01 cos (A/) x x tg (L (/0 - /)), cioè tutte le costanti sono espresse tramite C01. L'equazione della frequenza assume la forma EFo U-o1 L tg A-1 L) " (lo - l)) - K2 cos | í a!-,1 L Ad esempio, consideriamo un sistema con quattro barre laterali. Oltre al metodo sopra descritto, per questo esempio è possibile scrivere l'equazione della frequenza per l'intero sistema calcolando il determinante della matrice A ed eguagliandolo a zero. Diamo un'occhiata Y4 (L sin (L (/o - /)) cos (L/) EFoЛ+ L cos (L (/o - /)) (EFoЛ sin (L/) + 4v)) - 4av3L cos (L(/0 - /)) = 0. I grafici delle equazioni della frequenza trascendente per i casi sopra considerati sono presentati in Fig. 2. Come dati iniziali sono stati presi: EF = 2.109 N; EF0 = 2,2 109 N; k = 7 107 N/m; m = 5900 kg/m; m = 6000 kg/m; / = 23; /о = 33 m Di seguito sono riportati i valori delle prime tre frequenze di oscillazione del circuito considerato: N...................................... e, lieto/i................................... 1 2 3 20,08 31,53 63,50 Riso. 2. Grafici delle equazioni della frequenza trascendente per Coi = 0 (i) e Coi = 0 (2) Presentiamo i modi di vibrazione corrispondenti alle soluzioni ottenute (nel caso generale i modi di vibrazione non sono normalizzati). Le forme di vibrazione corrispondenti alla prima, seconda, terza, quarta, 13 e 14 frequenze sono mostrate in Fig. 3. Alla prima frequenza di vibrazione, le aste laterali vibrano con la stessa forma, ma a coppie in antifase Fig.3. Forme di vibrazione delle aste laterali (1) e centrali (2), corrispondenti alla prima V = 3,20 Hz (a), alla seconda V = 5,02 Hz (b), alla terza V = 10,11 Hz (c), alla quarta Frequenze V = 13,60 Hz (d), 13 V = 45,90 Hz (d) e 14 V = 50,88 Hz (f) (Fig. 3, a), con il secondo oscilla l'asta centrale e quelle laterali oscillano nella stessa forma in fase (Fig. 3, b). È da notare che la prima e la seconda frequenza di vibrazione del sistema di aste in esame corrispondono alle vibrazioni di un sistema costituito da corpi solidi. Quando il sistema oscilla con la terza frequenza naturale, compaiono per la prima volta i nodi (Fig. 3c). La terza e le successive frequenze (Fig. 3d) corrispondono alle vibrazioni elastiche del sistema. Con un aumento della frequenza delle vibrazioni, associato ad una diminuzione dell'influenza degli elementi elastici, le frequenze e le forme delle vibrazioni tendono ad essere parziali (Fig. 3, e, f). Le curve di funzioni, i cui punti di intersezione con l'asse delle ascisse sono soluzioni di equazioni trascendenti, sono presentate in Fig. 4. Secondo la figura, le frequenze proprie delle oscillazioni del sistema si trovano vicino alle frequenze parziali. Come notato sopra, con l'aumentare della frequenza, aumenta la convergenza delle frequenze naturali con quelle parziali. Di conseguenza, le frequenze alle quali oscilla l'intero sistema sono condizionatamente divise in due gruppi: quelle vicine alle frequenze parziali dell'asta laterale e le frequenze vicine alle frequenze parziali dell'asta centrale. Conclusioni. Viene considerato il problema delle vibrazioni longitudinali di un pacco di aste. Vengono descritte le proprietà del problema dei valori al contorno posto e lo spettro dei suoi autovalori. Viene proposta una soluzione al problema spettrale per un numero arbitrario di aste laterali omogenee. Per un esempio numerico si trovano i valori delle prime frequenze di oscillazione e si costruiscono le forme corrispondenti. Sono state inoltre rivelate alcune proprietà caratteristiche dei modi di vibrazione costruiti. Riso. 4. Le curve di funzioni, i cui punti di intersezione con l'asse delle ascisse sono soluzioni di equazioni trascendenti, per CoX = 0 (1), Cox = 0 (2) coincidono con il primo sistema parziale (asta laterale fissata all'elastico elemento nel punto x = I) e secondo sistema parziale (5) (asta centrale fissata a quattro elementi elastici nel punto A) LETTERATURA 1. Kolesnikov K.S. Dinamica dei razzi. M.: Ingegneria Meccanica, 2003. 520 p. 2. Missili balistici e veicoli di lancio / O.M. Alifanov, A.N. Andreev, V.N. Gushchin et al.M.: Bustard, 2004. 511 p. 3. Rabinovich B.I. Introduzione alla dinamica dei veicoli di lancio spaziali. M.: Ingegneria Meccanica, 1974. 396 p. 4. Studio dei parametri sulla stabilità POGO dei razzi liquidi / Z. Zhao, G. Ren, Z. Yu, B. Tang, Q. Zhang // J. of Spacecraft and Rockets. 2011. vol. 48. È. 3. P. 537-541. 5. Balakirev Yu.G. Metodi per analizzare le vibrazioni longitudinali dei veicoli di lancio a propulsione liquida // Cosmonautica e scienza missilistica. 1995. N. 5. P. 50-58. 6. Balakirev Yu.G. Caratteristiche del modello matematico di un razzo liquido di una disposizione batch come oggetto di controllo // Problemi selezionati di forza dell'ingegneria meccanica moderna. 2008, pp. 43-55. 7. Dokuchaev L.V. Miglioramento dei metodi per studiare la dinamica di un veicolo di lancio di pacchi, tenendo conto della loro simmetria // Cosmonautica e scienza missilistica. 2005. N. 2. P. 112-121. 8. Pozhalostin A.A. Sviluppo di metodi analitici approssimati per il calcolo delle vibrazioni naturali e forzate di gusci elastici con liquido: dis. ... Dottor Tech. Sci. M., 2005. 220 pag. 9. Gru S.G. Equazioni differenziali lineari in spazi di Banach. M.: Nauka, 1967. 464 p. 10. I.D. Kopačevskij Metodi operatori della fisica matematica. Simferopol: LLC "Forma", 2008. 140 p. Kolesnikov K.S. Rastrello Dinamika. Mosca, Mashinostroenie Publ., 2003. 520 p. Alifanov O.N., Andreev A.N., Gushchin V.N., eds. Rakety balistico e rakety-nositeli. Mosca, Drofa Publ., 2003. 511 p. Rabinovich B.I. Vvedenie v dinamiku raket-nositeley kosmicheskikh apparatov. Mosca, Mashinostroenie Publ., 1974. 396 p. Zhao Z., Ren G., Yu Z., Tang B., Zhang Q. Studio dei parametri sulla stabilità POGO del razzo a combustibile liquido. J. Veicoli spaziali e razzi, 2011, vol. 48, ed. 3, pagg. 537-541. Balakirev Yu.G. Metodi di analisi delle vibrazioni longitudinali dei lanciatori con motore a propellente liquido. Kosm. io raketostr. , 1995, n. 5, pagg. 50-58 (in russo). Balakirev Yu.G. Osobennosti matematicheskoy modeli zhidkostnoy rakety paketnoy komponovki kak ob"ekta upravlenii. Sb. "Izbrannye problemy prochnosti sovremennogo mashinostroeniya". Mosca, Fizmatlit Publ., 2008. 204 p. (cit. pp. 4355). Dokuchaev L.V. Miglioramento dei metodi per studiare la dinamica dei veicoli di lancio in cluster considerando la loro simmetria. Kosm. io raketostr. , 2005, n. 2, pagg. 112-121 (in russo). Pozhalostin A.A. Razrabotka priblizhennykh analiticheskikh metodov rascheta sobstvennykh i vynuzhdennykh kolebaniy uprugikh obolochek s zhidkost"yu. Diss. doct. tekhn. nauk . Kreyn S.G. Lineynye Differentsial"nye uravneniya v Banakhovykh prostranstvakh. Mosca, Nauka Publ., 1967. 464 p. Kopachevskiy I.D. Operatornye metody matematicheskoy fiziki. Simferopol", Forma Publ., 2008. 140 p. L'articolo è stato ricevuto dall'editore il 28 aprile 2014 Pavlov Arseniy Mikhailovich - studente del Dipartimento di veicoli spaziali e veicoli di lancio dell'Università tecnica statale di Mosca. NE Baumann. È specializzato nel campo della tecnologia missilistica e spaziale. MSTU im. NE Baumash, Federazione Russa, 105005, Mosca, 2nd Baumanskaya st., 5. Pavlov A.M. - studente del dipartimento "Veicoli spaziali e veicoli di lancio" dell'Università tecnica statale Bauman di Mosca. Specialista nel campo della tecnologia missilistica e spaziale. Università tecnica statale Bauman di Mosca, 2-ya Baumanskaya st. 5, Mosca, 105005 Federazione Russa. Temnov Alexander Nikolaevich - Ph.D. fisica e matematica Scienze, professore associato del Dipartimento di veicoli spaziali e veicoli di lancio, Università tecnica statale di Mosca. NE Baumann. Autore di oltre 20 articoli scientifici nel campo della meccanica dei fluidi e dei gas e della tecnologia missilistica e spaziale. MSTU im. NE Baumash, Federazione Russa, 105005, Mosca, 2nd Baumanskaya st., 5. Temnov A.N. -Cand. Sci. (Fis.-Matematica), assoc. professore del dipartimento "Veicoli spaziali e veicoli di lancio" dell'Università tecnica statale Bauman di Mosca. Autore di oltre 20 pubblicazioni nel campo della meccanica dei fluidi e dei gas e della tecnologia missilistica e spaziale. Università tecnica statale Bauman di Mosca, 2-ya Baumanskaya st. 5, Mosca, 105005 Federazione Russa. Oscillazioni libere di sistemi a parametri distribuiti La caratteristica principale del processo di vibrazioni libere di sistemi con un numero infinito di gradi di libertà è espressa nell'infinito del numero di frequenze naturali e forme modali. Ciò è legato anche a caratteristiche matematiche: invece delle ordinarie equazioni differenziali che descrivono le oscillazioni di sistemi con un numero finito di gradi di libertà, qui abbiamo a che fare con equazioni differenziali parziali. Oltre alle condizioni iniziali che determinano gli spostamenti e le velocità iniziali, è necessario tenere conto anche delle condizioni al contorno che caratterizzano il fissaggio del sistema. Analizzando le vibrazioni longitudinali di un'asta diritta (Fig. 67, a), assumeremo che le sezioni trasversali rimangano piatte e che le particelle dell'asta non eseguano movimenti trasversali, ma si muovano solo nella direzione longitudinale. Permettere tu
- movimento longitudinale della sezione corrente dell'asta durante le vibrazioni; questo movimento dipende dalla posizione della sezione (coordinate x) e dal tempo t. Quindi esiste una funzione di due variabili; la sua definizione rappresenta il compito principale. Lo spostamento di una sezione infinitamente chiusa è uguale a , quindi l'allungamento assoluto di un elemento infinitamente piccolo è uguale (Fig. 67, b), e il suo allungamento relativo è . Di conseguenza, la forza longitudinale nella sezione con la coordinata X può essere scritto come dove è la rigidità dell'asta in tensione (compressione). Anche la forza N è funzione di due argomenti: le coordinate X e il tempo t. Consideriamo un elemento ad asta situato tra due sezioni infinitamente vicine (Fig. 67, c). Una forza N viene applicata al lato sinistro dell'elemento e una forza viene applicata al lato destro. Se indichiamo la densità del materiale dell'asta, la massa dell'elemento in questione è . Pertanto, l'equazione del moto in proiezione sull'asse X
Considerando(173)e accettando UN= const, otteniamo Seguendo il metodo di Fourier, cerchiamo una soluzione particolare all'equazione differenziale (175) nella forma ,(177)
quelli. supponiamo che il movimento tu può essere rappresentato come il prodotto di due funzioni, una delle quali dipende solo dall'argomento X, e l'altro solo dall'argomento t. Allora, invece di definire una funzione di due variabili u (x, t), è necessario definire due funzioni X(x) e T(t), ciascuna delle quali dipende da una sola variabile. Sostituendo la (177) nella (174), otteniamo dove i numeri primi indicano l'operazione di differenziazione rispetto a X e per punti T. Riscriviamo l'equazione in questo modo: Qui il lato sinistro dipende solo da x, e il lato destro solo da t. Affinché questa uguaglianza valga in modo identico (per qualsiasi X e t) è necessario che ciascuna delle sue parti sia uguale a una costante, che indicheremo con: ; .(178) Ciò porta a due equazioni: ; La prima equazione ha una soluzione: indicando una natura oscillatoria, e dalla (180) è chiaro che l'incognita ha il significato della frequenza delle oscillazioni libere. La seconda delle equazioni (179) ha una soluzione: determinare la forma delle vibrazioni. L'equazione della frequenza che determina il valore viene compilata utilizzando le condizioni al contorno. Questa equazione è sempre trascendente e ha un numero infinito di radici. Pertanto, il numero di frequenze naturali è infinito e ciascun valore di frequenza corrisponde alla propria funzione T n (t), determinata dalla dipendenza (180), e alla propria funzione Xn (x), determinata dalla dipendenza (181). La soluzione (177) è solo parziale e non fornisce una descrizione completa del movimento. La soluzione completa si ottiene sovrapponendo tutte le soluzioni parziali: Vengono chiamate le funzioni X n (x). proprie funzioni problemi e descrivere le proprie modalità di vibrazione. Essi non dipendono dalle condizioni iniziali e soddisfano la condizione di ortogonalità, che per A = cost ha la forma Consideriamo alcune opzioni per le condizioni al contorno. Estremità fissa dell'asta(Fig. 68, a). Nella sezione terminale lo spostamento u deve essere nullo; ne consegue che in questa sezione X=0(182) Estremità libera dell'asta(Fig. 68, b). Nella sezione finale, la forza longitudinale (183)
deve essere identicamente uguale a zero, cosa possibile se alla fine della sezione X"=0. Resiliente
estremità dell'asta(Fig. 68, c). Durante lo spostamento tu estremità dell'asta, si verifica una reazione di supporto elastico se il supporto si trova all'estremità sinistra dell'asta (Fig. 68, c), e se il supporto si trova all'estremità destra dell'asta (Fig. 68, d). Massa concentrata all'estremità dell'asta. Forza d'inerzia sviluppata dalla massa: Poiché, secondo la prima delle equazioni (179), , la forza d'inerzia può essere scritta nella forma . Otteniamo la condizione al contorno se la massa è all'estremità sinistra (Fig. 68, d), e se la massa è collegata all'estremità destra (Fig. 68, e). Determiniamo le frequenze naturali dell'asta a sbalzo (Fig. 68,a"). Secondo (182) e (183), le condizioni al contorno X=0a x=0; X"=0 a x= . Sostituendo queste condizioni una per una nella soluzione (181), otteniamo La condizione C0 porta all'equazione della frequenza: Le radici di questa equazione determinare le frequenze naturali: Prima frequenza (più bassa) a n=1: Seconda frequenza (a n=2): Determiniamo le frequenze naturali di un'asta con una massa all'estremità (Fig. 68, f). Secondo (182) e (184), abbiamo X=0 in x=0; Sostituendo queste condizioni nella soluzione (181), otteniamo: D=0; Di conseguenza, l'equazione della frequenza quando si prende in considerazione la (176) ha la forma Qui il lato destro rappresenta il rapporto tra la massa dell'asta e la massa del carico finale. Per risolvere l'equazione trascendente risultante, è necessario utilizzare un metodo approssimato. A e i valori della radice più importante saranno rispettivamente 0,32 e 0,65. Con un rapporto piccolo, il carico ha un'influenza decisiva e una soluzione approssimata dà buoni risultati Per barre a sezione variabile, es. per Аconst, dalle (173) e (174) si ottiene l'equazione del moto nella forma Questa equazione differenziale non può essere risolta in forma chiusa. Pertanto, in tali casi è necessario ricorrere a metodi approssimativi per determinare le frequenze naturali. Le vibrazioni torsionali di alberi con una massa distribuita in modo continuo (Fig. 69, a) sono descritte da equazioni che, nella struttura, coincidono completamente con le equazioni di cui sopra per le vibrazioni longitudinali delle aste. Coppia M nella sezione con ascisse Xè legato all'angolo di rotazione da una dipendenza differenziale simile alla (173): Dove Jp-momento d'inerzia polare della sezione trasversale. In una sezione situata a distanza dx, la coppia è pari a (Fig. 69, b): Denotando attraverso (dove è la densità del materiale dell'albero) l'intensità del momento di inerzia della massa dell'albero rispetto al suo asse (cioè il momento di inerzia per unità di lunghezza), l'equazione del moto di una sezione elementare dell'albero può essere scritto come segue: o simili (174): Sostituendo qui l'espressione (186) con Jp=const otteniamo, analogamente alla (175): La soluzione generale dell'equazione (187), come l'equazione (175), ha la forma Le frequenze naturali e le autofunzioni sono determinate da specifiche condizioni al contorno. Nei principali casi di fissaggio delle estremità, analogamente al caso delle vibrazioni longitudinali, si ottiene a) estremità fissa (=0): X=0; b) estremità libera (M=0): X"=0; V) resiliente estremità sinistra: CoХ=GJpX "(coefficiente di rigidezza); G) resiliente estremità destra: -CoX=GJpX "; e) disco all'estremità sinistra: e) disco all'estremità destra: Se l'albero è fissato all'estremità sinistra (x=0) e l'estremità destra (x=) è libera, allora X=0 in x=0 e X"=0 in x=; le frequenze naturali sono determinate in modo simile a ( 185): Se l'estremità sinistra è fissa e all'estremità destra è presente un disco, otteniamo l'equazione trascendente: Se entrambe le estremità dell'albero sono fisse, le condizioni al contorno saranno X=0 per x=0 e x=. In questo caso dalla (188) si ottiene quelli. (n=1,2,…), da qui troviamo le frequenze naturali: Se l'estremità sinistra dell'albero è libera e all'estremità destra è presente un disco, allora X"=0 per x=0;Jo X=GJpX "per x=. Usando la (188) troviamo C=0; o equazione della frequenza trascendente: Dal corso sulla resistenza dei materiali sono note le dipendenze differenziali per la flessione delle travi: dove EJ è la rigidità alla flessione; y=y (x, t) - deflessione; M=M(x, t) - momento flettente; q è l'intensità del carico distribuito. Combinando la (189) e la (190), otteniamo Nel problema delle vibrazioni libere, il carico per lo scheletro elastico sono le forze inerziali distribuite: dove m è l'intensità della massa del raggio (massa per unità di lunghezza) e l'equazione (191) assume la forma Nel caso speciale di sezione trasversale costante, quando EJ = const, m = const, abbiamo: Per risolvere l'equazione (192), assumiamo, come sopra, sì=X( X)×
T ( t ).(193) Sostituendo la (193) nella (192), si ottiene l'equazione: Perché questa uguaglianza sia soddisfatta in modo identico, è necessario che ciascuna delle parti dell'uguaglianza sia costante. Indicando questa costante con , otteniamo due equazioni: La prima equazione indica che il movimento è oscillatorio con frequenza. La seconda equazione determina la forma delle vibrazioni. La soluzione dell'equazione (195) contiene quattro costanti e ha la forma È conveniente utilizzare la variante di scrivere la soluzione generale proposta da A.N. Krylov: rappresentano le funzioni di A.N. Krylov. Prestiamo attenzione al fatto che S=1, T=U=V=0 in x=0. Le funzioni S,T,U,V sono interconnesse come segue: Pertanto, le espressioni derivate (197) sono scritte nella forma Nei problemi della classe in esame, il numero delle frequenze naturali è infinitamente grande; ciascuno di essi ha una propria funzione temporale T n e una propria funzione fondamentale X n . La soluzione generale si ottiene imponendo soluzioni parziali della forma (193) Per determinare le frequenze naturali e le formule, è necessario considerare le condizioni al contorno. Per ciascuna estremità della barra è possibile specificare due condizioni al contorno .
Estremità libera dell'asta(Fig. 70, a). La forza trasversale Q=EJX""T e il momento flettente M=EJX""T sono uguali a zero. Pertanto le condizioni al contorno hanno la forma X""=0; X"""=0 .(202) Estremità supportata incernierata dell'asta(Fig. 70, b). La freccia y=XT e il momento flettente M=EJX""T sono uguali a zero. Pertanto le condizioni al contorno sono: X=0; X""=0 .(203) Estremità pizzicata(Fig. 70, c). La deflessione y=XT e l'angolo di rotazione sono uguali a zero. Condizioni al confine: X=0; X"=0 . (204) C'è una massa puntiforme all'estremità dell'asta(Fig. 70, d). La sua forza inerziale Nella prima condizione, viene preso un segno più quando il carico concentrato è collegato all'estremità sinistra dell'asta e un segno meno quando è collegato all'estremità destra dell'asta. La seconda condizione deriva dall'assenza di momento flettente. Estremità dell'asta supportata elasticamente(Fig. 70, d). Qui il momento flettente è zero e la forza trasversale Q=EJX"""T è uguale alla reazione del vincolo Condizioni al confine: X""=0; (206) (si prende il segno meno quando il supporto elastico è a sinistra, il segno più quando è a destra). Una registrazione ampliata delle condizioni al contorno porta ad equazioni omogenee rispetto alle costanti C 1, C 2, C 3, C 4. Affinché queste costanti non siano uguali a zero, il determinante costituito dai coefficienti del sistema deve essere uguale a zero; questo porta ad un'equazione di frequenza. Durante queste operazioni vengono chiariti i rapporti tra C 1, C 2, C 3, C 4, cioè vengono determinati i modi naturali di vibrazione (fino ad un fattore costante). Tracciamo la composizione delle equazioni di frequenza utilizzando esempi. Per una trave con estremità incernierate, secondo la (203), valgono le seguenti condizioni al contorno: X=0; X""=0 per x=0 e x= . Utilizzando (197)-(200) otteniamo dalle prime due condizioni: C 1 =C 3 =0. Le due condizioni rimanenti possono essere scritte come Affinché C 2 e C 4 non siano uguali a zero, il determinante deve essere uguale a zero: Pertanto, l'equazione della frequenza ha la forma Sostituendo le espressioni T e U, otteniamo Poiché , l'equazione della frequenza finale è scritta come segue: .
(207)
Le radici di questa equazione sono: ,(n =1,2,3,...). Tenendo conto della (196), otteniamo Passiamo alla definizione delle nostre forme. Dalle equazioni omogenee scritte sopra, segue la seguente relazione tra le costanti C 2 e C 4: Di conseguenza, (197) assume la forma Secondo (207), abbiamo dove è una nuova costante, il cui valore rimane incerto finché non vengono prese in considerazione le condizioni iniziali. Se è necessario determinare il movimento successivo alla perturbazione iniziale, allora è necessario indicare sia gli spostamenti iniziali che le velocità iniziali per tutti i punti della trave: e utilizzare la proprietà di ortogonalità delle autoforme: Scriviamo la soluzione generale (201) come segue: La velocità è data da Sostituendo gli spostamenti iniziali e le velocità assunte note nei membri di destra delle equazioni (211) e (212), e nei membri di sinistra, otteniamo Moltiplicando queste espressioni per e integrandole su tutta la lunghezza, abbiamo Le somme infinite sui membri di destra sono scomparse a causa della proprietà di ortogonalità. Dalla (213) seguono le formule per le costanti e Ora questi risultati devono essere sostituiti nella soluzione (211). Sottolineiamo ancora che la scelta della scala delle autoforme non è importante. Se, ad esempio, nell'espressione dell'autoforma (209) prendiamo invece un valore volte più grande, allora (214) darà risultati volte più piccoli; dopo la sostituzione nella soluzione (211), queste differenze si compensano a vicenda. Tuttavia, spesso usano autofunzioni normalizzate, scegliendo la loro scala in modo tale che i denominatori delle espressioni (214) siano uguali a uno, il che semplifica le espressioni e . Consideriamo il caso in cui una trave oscillante subisce una forza longitudinale N, la cui entità non cambia durante il processo di oscillazione. In questo caso l’equazione della flessione statica si complica e assume la forma (a condizione che la forza di compressione sia considerata positiva) Assumendo e considerando la costante di rigidezza, otteniamo l'equazione delle vibrazioni libere Continuiamo ad accettare una soluzione particolare nel modulo. Quindi l'equazione (215) si divide in due equazioni: La prima equazione esprime la natura oscillatoria della soluzione, la seconda determina la forma delle oscillazioni, e permette anche di ricavarne le frequenze. Riscriviamolo in questo modo: (216)
Dove Kè determinato dalla formula (196), e La soluzione dell'equazione (216) ha la forma Consideriamo il caso in cui entrambe le estremità dell'asta hanno supporti incernierati. Condizioni all'estremità sinistra Uguagliando a zero il determinante composto dai coefficienti delle quantità e , si arriva all'equazione Le radici di questa equazione di frequenza sono: Pertanto, la frequenza naturale è determinata dall'equazione Da qui, tenendo conto della (217), troviamo Quando allungato, la frequenza aumenta, quando compresso diminuisce. Quando la forza di compressione N si avvicina ad un valore critico, la radice tende a zero. Precedentemente la forza longitudinale era considerata data e indipendente dagli spostamenti del sistema. In alcuni problemi pratici, la forza longitudinale che accompagna il processo di vibrazioni trasversali è dovuta alla flessione della trave e ha il carattere di una reazione di supporto. Consideriamo, ad esempio, una trave su due supporti incernierati e fissi. Quando si flette si verificano reazioni orizzontali dei supporti che provocano l'allungamento della trave; viene solitamente chiamata la forza orizzontale corrispondente forza della catena. Se la trave oscilla trasversalmente, la forza della catena cambierà nel tempo. Se all'istante t le deflessioni della trave sono determinate dalla funzione, allora l'allungamento dell'asse può essere trovato utilizzando la formula Troviamo la forza della catena corrispondente utilizzando la legge di Hooke Sostituiamo questo risultato nella (215) al posto della forza longitudinale N (tenendo conto del segno) Il risultante non lineare integrodifferenziale l'equazione viene semplificata utilizzando la sostituzione dove è una funzione adimensionale del tempo, il cui valore massimo può essere impostato uguale a qualsiasi numero, ad esempio l'unità; ampiezza delle oscillazioni. Sostituendo la (221) nella (220), otteniamo l'equazione differenziale ordinaria i cui coefficienti hanno i seguenti valori: L'equazione differenziale (222) non è lineare, pertanto la frequenza delle oscillazioni libere dipende dalla loro ampiezza. La soluzione esatta per la frequenza delle vibrazioni trasversali ha la forma dov'è la frequenza delle vibrazioni trasversali, calcolata senza tenere conto delle forze della catena; fattore di correzione dipendente dal rapporto tra l'ampiezza dell'oscillazione e il raggio di rotazione della sezione trasversale; il valore è riportato nella letteratura di riferimento. Quando l'ampiezza e il raggio di rotazione della sezione trasversale sono commisurati, la correzione della frequenza diventa significativa. Se, ad esempio, l'ampiezza della vibrazione di un'asta tonda è uguale al suo diametro, allora , e la frequenza è quasi doppia rispetto al caso di spostamento libero dei supporti. Il caso corrisponde ad un valore zero del raggio di inerzia, quando la rigidità alla flessione della trave è incredibilmente piccola: una corda. Allo stesso tempo, la formula per dà incertezza. Rivelando questa incertezza, otteniamo una formula per la frequenza di vibrazione della corda Questa formula si applica al caso in cui la tensione è zero nella posizione di equilibrio. Spesso il problema delle oscillazioni delle corde si pone sotto altri presupposti: si ritiene che gli spostamenti siano piccoli e che la forza di trazione sia data e rimanga invariata durante il processo di oscillazione. In questo caso, la formula per la frequenza ha la forma dove N è una forza di trazione costante. In precedenza si presumeva che il materiale delle aste fosse perfettamente elastico e non vi fosse attrito. Consideriamo l'influenza dell'attrito interno, supponendo che sia viscoso; quindi la relazione tra sollecitazione e deformazione è descritta dalle relazioni Lascia che un'asta con parametri distribuiti esegua vibrazioni longitudinali libere. In questo caso la forza longitudinale verrà scritta nella forma Dall'equazione del moto dell'elemento asta si ottiene la relazione (174). Sostituendo qui la (224), arriviamo all'equazione differenziale principale che differisce dalla (175) per il secondo termine, che esprime l'influenza delle forze di attrito viscoso. Seguendo il metodo di Fourier, cerchiamo una soluzione all'equazione (225) nella forma dove la funzione è solo le coordinate x e la funzione è solo il tempo t. In questo caso ogni membro della serie deve soddisfare le condizioni al contorno del problema, e l’intera somma deve soddisfare anche le condizioni iniziali. Sostituendo la (226) nella (225) e richiedendo che l'uguaglianza sia soddisfatta per qualsiasi numero R, noi abbiamo dove i numeri primi indicano la differenziazione rispetto alla coordinata X, e i punti sono differenziazione rispetto al tempo t. Dividendo (227) per il prodotto lato sinistro, che può dipendere solo dalle coordinate X, e quello giusto - solo dal tempo t. Perché l'uguaglianza (228) sia soddisfatta in modo identico, è necessario che entrambe le parti siano uguali alla stessa costante, che indicheremo con . Da questo seguono le equazioni L'equazione (229) non dipende dal coefficiente di viscosità K e, in particolare, rimane la stessa nel caso di un sistema perfettamente elastico, quando . Pertanto i numeri coincidono completamente con quelli riscontrati in precedenza; tuttavia, come verrà mostrato di seguito, il valore fornisce solo un valore approssimativo della frequenza naturale. Si noti che le forme proprie sono completamente indipendenti dalle proprietà viscose dell'asta, cioè le forme delle oscillazioni libere smorzate coincidono con le forme delle oscillazioni libere non smorzate. Passiamo ora all'equazione (230), che descrive il processo delle oscillazioni smorzate; la sua soluzione ha la forma L'espressione (232) determina la velocità di decadimento e (233) determina la frequenza di oscillazione. Pertanto, la soluzione completa dell'equazione del problema Costante e può sempre essere trovato in base a determinate condizioni iniziali. Si specifichino gli spostamenti iniziali e le velocità iniziali di tutte le sezioni dell'asta come segue: ; dove e sono funzioni note. Allora per , secondo (211) e (212), abbiamo moltiplicando entrambi i lati di queste uguaglianze per e integrando su tutta la lunghezza dell'asta, otteniamo Secondo la condizione di ortogonalità delle autoforme, tutti gli altri termini inclusi nei membri di destra di queste uguaglianze diventano zero. Ora dalle uguaglianze (236) è facile trovare per qualsiasi numero r. Considerando la (232) e la (234), si nota che maggiore è il numero del modo di vibrazione, più rapido sarà lo smorzamento. Inoltre, i termini inclusi nella (234) descrivono oscillazioni smorzate se esiste un numero reale. Dalla (233) è chiaro che ciò avviene solo per pochi valori iniziali di r purché la disuguaglianza sia soddisfatta Per valori sufficientemente grandi R la disuguaglianza (237) viene violata e la quantità diventa immaginaria. In questo caso i termini corrispondenti della soluzione generale (234) non descriveranno più oscillazioni smorzate, ma rappresenteranno un moto smorzato aperiodico. In altre parole, le vibrazioni, nel senso comune del termine, sono espresse solo da una certa parte finita della somma (234). Tutte queste conclusioni qualitative si applicano non solo al caso delle vibrazioni longitudinali, ma anche ai casi delle vibrazioni torsionali e flettenti. Nei casi in cui la massa distribuita e la sezione trasversale dell'asta sono variabili lungo la sua lunghezza, invece dell'equazione della vibrazione longitudinale (175), si dovrebbe procedere dall'equazione L'equazione della vibrazione torsionale (187) deve essere sostituita dall'equazione e l'equazione delle vibrazioni trasversali (192) è l'equazione Le equazioni (238)-(240) con l'aiuto di sostituzioni simili ;;possono essere ridotte alle ordinarie equazioni differenziali per la funzione In questa sezione considereremo il problema delle vibrazioni longitudinali di un'asta omogenea. Un'asta è un corpo cilindrico (in particolare prismatico), per allungare o comprimere il quale è necessario applicare una certa forza. Assumeremo che tutte le forze agiscano lungo l'asse dell'asta e ciascuna delle sezioni trasversali dell'asta (Fig. 23) si muova traslatoriamente solo lungo l'asse dell'asta. Di solito questa ipotesi è giustificata se le dimensioni trasversali dell'asta sono piccole rispetto alla sua lunghezza e le forze che agiscono lungo l'asse dell'asta sono relativamente piccole. In pratica, le vibrazioni longitudinali si verificano più spesso quando l'asta viene prima leggermente allungata o, al contrario, compressa e poi lasciata a se stessa. In questo caso si verificano vibrazioni longitudinali libere. Deriviamo le equazioni per queste oscillazioni. Dirigiamo l'asse delle ascisse lungo l'asse dell'asta (Fig. 23); in stato di riposo le estremità dell'asta hanno rispettivamente le ascisse Considerare la sezione trasversale; - la sua ascissa è a riposo. Lo spostamento di questa sezione in ogni istante t sarà caratterizzato da una funzione per trovare la quale dobbiamo creare un'equazione differenziale. Troviamo innanzitutto l'allungamento relativo della sezione dell'asta limitata dalle sezioni: se l'ascissa della sezione è a riposo, allora lo spostamento di tale sezione al tempo t, accurato agli infinitesimi di ordine superiore, è pari a Pertanto l'allungamento relativo dell'asta nella sezione con l'ascissa al tempo t è pari a Supponendo che le forze che causano questo allungamento obbediscano alla legge di Hooke, troveremo l’entità della forza di tensione T agente sulla sezione: dove è l'area della sezione trasversale dell'asta ed è il modulo elastico (modulo di Young) del materiale dell'asta. La formula (5.2) dovrebbe essere ben nota al lettore dal corso sulla resistenza dei materiali. Di conseguenza, la forza che agisce sulla sezione è uguale a Poiché le forze sostituiscono l'azione delle parti scartate dell'asta, la loro forza risultante è uguale alla differenza Considerando la sezione selezionata dell'asta come un punto materiale con massa , dove è la densità volumetrica dell'asta, e applicando ad essa la seconda legge di Newton, creiamo l'equazione Abbreviando con ed introducendo la notazione si ottiene l'equazione differenziale delle vibrazioni longitudinali libere dell'asta Se assumiamo inoltre che all'asta venga applicata una forza esterna calcolata per unità di volume e agente lungo l'asse dell'asta, allora verrà aggiunto un termine al lato destro della relazione (5 3) e l'equazione (5.4) assumerà la forma modulo che coincide esattamente con l'equazione delle oscillazioni forzate della corda. Passiamo ora a stabilire le condizioni iniziali e al contorno del problema e consideriamo il caso praticamente più interessante, quando un'estremità dell'asta è fissa e l'altra è libera. All'estremità libera la condizione al contorno avrà una forma diversa. Poiché a questa estremità non sono presenti forze esterne, anche la forza T agente nella sezione deve essere pari a zero, cioè Le oscillazioni si verificano perché nel momento iniziale l'asta è stata deformata (allungata o compressa) e alle punte dell'asta sono state impartite determinate velocità iniziali. Pertanto, al momento dobbiamo conoscere lo spostamento delle sezioni trasversali dell'asta così come le velocità iniziali delle punte dell'asta Quindi, il problema delle vibrazioni longitudinali libere di un'asta fissata ad un'estremità, derivanti dalla compressione o tensione iniziale, ci ha portato all'equazione con condizioni iniziali e condizioni al contorno È quest'ultima condizione che, da un punto di vista matematico, distingue il problema in esame dal problema delle oscillazioni di una corda fissata ad entrambe le estremità. Risolveremo il problema posto dal metodo di Fourier, ovvero troveremo soluzioni parziali dell'equazione che soddisfano le condizioni al contorno (5.8) nella forma Poiché l'ulteriore svolgimento della soluzione è simile a quello già delineato al § 3, ci limiteremo a solo brevi indicazioni. Differenziando la funzione , sostituendo le espressioni risultanti nella (5.6) e separando le variabili, otteniamo (Lasciamo al lettore stabilire autonomamente che, a causa delle condizioni al contorno, la costante a destra non può essere un numero positivo o zero.) La soluzione generale dell'equazione ha la forma A causa delle condizioni imposte sulla funzione che avremo Soluzioni non identicamente uguali a zero si otterranno solo se è soddisfatta la condizione, cioè per , dove k può assumere valori Quindi, gli autovalori del problema sono i numeri Ognuno ha la propria funzione Come già sappiamo, moltiplicando una qualsiasi delle autofunzioni per una costante arbitraria, otterremo una soluzione dell'equazione con le condizioni al contorno impostate. È facile verificare che dando al numero k valori negativi, non otterremo nuove autofunzioni (ad esempio, a piacimento risulterà una funzione che differisce dall'autofunzione ) solo nel segno), Dimostriamo innanzitutto che le autofunzioni (5.11) sono ortogonali nell'intervallo . Infatti, quando Se poi È possibile dimostrare l'ortogonalità delle autofunzioni in un altro modo, non basandosi sulle loro espressioni esplicite, ma utilizzando solo l'equazione differenziale e le condizioni al contorno. Siano e due autovalori distinti e siano le corrispondenti autofunzioni. Per definizione, queste funzioni soddisfano le equazioni e condizioni al contorno. Moltiplichiamo la prima equazione per la seconda e sottraiamo l'una dall'altra. Onde longitudinali Definizione 1 Un'onda in cui si verificano oscillazioni nella direzione della sua propagazione. Un esempio di onda longitudinale è un'onda sonora. Figura 1. Onda longitudinale Le onde longitudinali meccaniche sono anche chiamate onde di compressione o onde di compressione perché producono compressione mentre si muovono attraverso un mezzo. Le onde meccaniche trasversali sono anche chiamate "onde T" o "onde di taglio". Le onde longitudinali comprendono le onde acustiche (la velocità delle particelle che viaggiano in un mezzo elastico) e le onde sismiche P (create da terremoti ed esplosioni). Nelle onde longitudinali lo spostamento del mezzo è parallelo alla direzione di propagazione dell'onda. Nel caso delle onde sonore armoniche longitudinali, la frequenza e la lunghezza d'onda possono essere descritte dalla formula: $y_0-$ ampiezza dell'oscillazione;\textit() $\omega -$ frequenza angolare dell'onda; $c-$ velocità dell'onda. La frequenza abituale dell'onda $\left((\rm f)\right)$ è data da La velocità di propagazione del suono dipende dal tipo, dalla temperatura e dalla composizione del mezzo attraverso il quale viaggia. In un mezzo elastico, un'onda longitudinale armonica viaggia nella direzione positiva lungo l'asse. Definizione 2 Onda trasversale- un'onda in cui la direzione delle molecole di vibrazione del mezzo è perpendicolare alla direzione di propagazione. Un esempio di onde trasversali è un'onda elettromagnetica. Figura 2. Onde longitudinali e trasversali Le increspature in uno stagno e le onde lungo una corda possono essere facilmente rappresentate come onde trasversali. Figura 3. Le onde luminose sono un esempio di onda trasversale Le onde trasversali sono onde che oscillano perpendicolarmente alla direzione di propagazione. Esistono due direzioni indipendenti in cui possono verificarsi i movimenti delle onde. Definizione 3 Le onde di taglio bidimensionali mostrano un fenomeno chiamato polarizzazione. Le onde elettromagnetiche si comportano allo stesso modo, anche se sono un po' più difficili da vedere. Anche le onde elettromagnetiche sono onde trasversali bidimensionali. Esempio 1 Dimostrare che l'equazione di un'onda piana non smorzata è $(\rm y=Acos)\left(\omega t-\frac(2\pi )(\lambda )\right)x+(\varphi )_0$ per l'onda mostrata nella figura , può essere scritto come $(\rm y=Asin)\left(\frac(2\pi )(\lambda )\right)x$. Verificalo sostituendo i valori delle coordinate $\ \ x$ che sono $\frac(\lambda)(4)$; $\frac(\lambda)(2)$; $\frac(0.75)(\lambda)$. Figura 4. L'equazione $y\left(x\right)$ per un'onda piana non smorzata non dipende da $t$, il che significa che il momento $t$ può essere scelto arbitrariamente. Scegliamo l'istante di tempo $t$ tale che \[\omega t=\frac(3)(2)\pi -(\varphi )_0\] \ Sostituiamo questo valore nell'equazione: \ \[=Acos\sinistra(2\pi -\frac(\pi )(2)-\left(\frac(2\pi )(\lambda )\right)x\right)=Acos\sinistra(2\ pi -\left(\left(\frac(2\pi )(\lambda )\right)x+\frac(\pi )(2)\right)\right)=\] \[=Acos\left(\left (\frac(2\pi )(\lambda )\right)x+\frac(\pi )(2)\right)=Asin\left(\frac(2\pi )(\lambda )\right)x\] \ \ \[(\mathbf x)(\mathbf =)\frac((\mathbf 3))((\mathbf 4))(\mathbf \lambda )(\mathbf =)(\mathbf 18),(\mathbf 75)(\mathbf \ cm,\ \ \ )(\mathbf y)(\mathbf =\ )(\mathbf 0),(\mathbf 2)(\cdot)(\mathbf sin)\frac((\mathbf 3 ))((\mathbf 2))(\mathbf \pi )(\mathbf =-)(\mathbf 0),(\mathbf 2)\] Risposta: $Asin\sinistra(\frac(2\pi )(\lambda )\destra)x$ ISSN: 2310-7081 (online), 1991-8615 (stampato) doi: http://dx.doi UDC 517.956.3 PROBLEMA SULLE VIBRAZIONI LONGITUDINALI DI UN'ASTA CARICATA ELASTICAMENTE FISSA AB Beilin Università tecnica statale di Samara, Russia, 443100, Samara, st. Molodogvardejskaja, 244. annotazione Vengono considerate le vibrazioni longitudinali unidimensionali di un'asta corta e spessa fissata alle estremità mediante masse concentrate e molle. Come modello matematico viene utilizzato un problema di valore al contorno iniziale con condizioni al contorno dinamiche per un'equazione iperbolica del quarto ordine. La scelta di questo particolare modello è dovuta alla necessità di tenere conto degli effetti della deformazione dell'asta nella direzione trasversale, la cui trascuratezza, come mostrato da Rayleigh, porta ad un errore, confermato dal moderno concetto nonlocale di studio delle vibrazioni dei corpi solidi. Si dimostra l'esistenza di un sistema di autofunzioni del problema in studio, ortogonale al carico, e se ne ottiene la rappresentazione. Le proprietà consolidate delle autofunzioni hanno permesso di applicare il metodo di separazione delle variabili e dimostrare l'esistenza di una soluzione unica al problema posto. Parole chiave: condizioni dinamiche al contorno, vibrazioni longitudinali, ortogonalità al carico, modello di Rayleigh. Introduzione. In qualsiasi sistema meccanico funzionante si verificano processi oscillatori che possono essere generati da vari motivi. I processi oscillatori possono essere una conseguenza delle caratteristiche di progettazione del sistema o della ridistribuzione dei carichi tra i vari elementi di una struttura normalmente operativa. La presenza di fonti di processi oscillatori nel meccanismo può rendere difficile la diagnosi delle sue condizioni e persino portare all'interruzione del suo funzionamento e, in alcuni casi, alla distruzione. Vari problemi associati all'interruzione della precisione e delle prestazioni dei sistemi meccanici a causa della vibrazione di alcuni dei loro elementi vengono spesso risolti sperimentalmente nella pratica. Allo stesso tempo, i processi oscillatori possono essere molto utili, ad esempio, per la lavorazione dei materiali, l'assemblaggio e lo smontaggio dei giunti. Le vibrazioni ultrasoniche consentono non solo di intensificare i processi di taglio (foratura, fresatura, rettifica, ecc.) di materiali con elevata durezza (acciai contenenti tungsteno, acciai al carburo di titanio, ecc.), © 2016 Università tecnica statale di Samara. Modello di citazione Beilin A. B. Problema delle vibrazioni longitudinali di un'asta caricata fissata elasticamente // Vestn. Me stessa. stato tecnologia. un-ta. Ser. Fis.-matematica. Scienze, 2016. T. 20, No. 2. P. 249258. doi: 10.14498/vsgtu1474. Circa l'autore Alexander Borisovich Beilin (Ph.D., professore associato; [e-mail protetta]), professore associato, dipartimento. sistemi automatizzati di macchine e utensili. ma in alcuni casi può diventare l'unico metodo possibile per la lavorazione di materiali fragili (germanio, silicio, vetro, ecc.). L'elemento del dispositivo (guida d'onda) che trasmette le vibrazioni ultrasoniche dalla sorgente (vibratore) all'utensile è chiamato concentratore e può avere diverse forme: cilindrica, conica, a gradini, esponenziale, ecc. Il suo scopo è trasmettere allo strumento vibrazioni dell'ampiezza richiesta. Pertanto, le conseguenze del verificarsi dei processi oscillatori possono essere diverse, così come le ragioni che li causano, quindi sorge naturalmente la necessità di uno studio teorico dei processi oscillatori. Il modello matematico della propagazione delle onde in aste solide relativamente lunghe e sottili, basato sull'equazione delle onde del secondo ordine, è stato ben studiato ed è diventato a lungo un classico. Tuttavia, come mostrato da Rayleigh, questo modello non corrisponde completamente allo studio delle vibrazioni di un'asta corta e spessa, mentre molti dettagli dei meccanismi reali possono essere interpretati come aste corte e spesse. In questo caso è necessario tenere conto anche della deformazione dell'asta nella direzione trasversale. Un modello matematico delle vibrazioni longitudinali di un'asta corta e spessa, che tiene conto degli effetti del movimento trasversale dell'asta, è chiamato asta di Rayleigh e si basa su un'equazione iperbolica del quarto ordine ^ ^- IX (a(x) e)- dx (b(x))=; (XL (1) i cui coefficienti hanno significato fisico: d(x) = p(x)A(x), a(x) = A(x)E(x), b(x) = p(x)u2(x)1p (x), dove A(x) è l'area della sezione trasversale, p(x) è la densità di massa dell'asta, E(x) è il modulo di Young, V(x) è il rapporto di Poisson, IP(x) è il momento di inerzia polare , u(x,b) - spostamenti longitudinali da determinare. Le idee di Rayleigh hanno trovato la loro conferma e sviluppo nei lavori moderni dedicati ai processi di oscillazione, nonché alla teoria della plasticità. L'articolo di revisione conferma le carenze dei modelli classici che descrivono lo stato e il comportamento dei corpi solidi sotto carico, in cui a priori il corpo è considerato un continuum ideale. L’attuale livello di sviluppo delle scienze naturali richiede la costruzione di nuovi modelli che descrivano adeguatamente i processi studiati, e i metodi matematici sviluppati negli ultimi decenni forniscono questa opportunità. Su questa strada, nell'ultimo quarto del secolo scorso, è stato proposto un nuovo approccio allo studio di molti processi fisici, compresi quelli sopra citati, basato sul concetto di nonlocalità (si veda l'articolo e la bibliografia in esso contenuta) . Una delle classi di modelli nonlocali identificate dagli autori è chiamata “debolmente nonlocali”. I modelli matematici appartenenti a questa classe possono essere implementati introducendo derivate di ordine elevato nell'equazione che descrive un determinato processo, che consentono di tenere conto, con una certa approssimazione, dell'interazione degli elementi interni dell'oggetto di studio. Pertanto, il modello di Rayleigh è ancora attuale oggi. 1. Dichiarazione del problema. Siano fissate le estremità dell'asta x = 0, x = I ad una base fissa con l'aiuto di masse concentrate L\, M2 e molle, le cui rigidezze sono K\ e K2. Assumeremo che l'asta sia un corpo in rotazione attorno all'asse 0x e nell'istante iniziale sia a riposo in una posizione di equilibrio. Arriviamo quindi al seguente problema sui valori al contorno iniziale. Compito. Trova nell'area Qt = ((0,1) x (0, T) : 1,T< те} "решение уравнения (1), удовлетворяющее начальным данным u(x, 0) = (p(x), u(x, 0) = φ(x) e condizioni al contorno a(0)ikh(0, r) + b(0)il(0, r) - k^(0, r) - M1ui(0, r) = 0, a(1)ih(1, r) + b(1)uxy(1, r) + K2u(1, r) + M2uy(1, r) = 0. () L'articolo esamina alcuni casi particolari del problema (1)-(2) e fornisce esempi in cui i coefficienti dell'equazione hanno forma esplicita e M\ = M2 = 0. L'articolo dimostra l'unica risolubilità debole del problema posto nell'equazione caso generale. Le condizioni (2) sono determinate dal metodo di fissaggio dell'asta: le sue estremità sono fissate a basi fisse mediante alcuni dispositivi aventi rispettivamente masse M\, M2 e molle con rigidità K1, K2. La presenza di masse e la presa in considerazione degli spostamenti trasversali porta a condizioni della forma (2), contenente derivate rispetto al tempo. Le condizioni al contorno che includono le derivate temporali sono chiamate dinamiche. Possono sorgere in varie situazioni, le più semplici delle quali sono descritte nel libro di testo e quelle molto più complesse nella monografia. 2. Studio delle vibrazioni naturali della canna. Consideriamo un'equazione omogenea corrispondente all'equazione (1). Poiché i coefficienti dipendono solo da x, possiamo separare le variabili scrivendo u(x,r) = X(x)T(r). Otteniamo due equazioni: t""(g) + \2t(g) = 0, ((a(x) - A2b(x))X"(x))" + A2dX(x) = 0. (3) L'equazione (3) è accompagnata da condizioni al contorno (a(0) - \2Ú(0))Å"(0) - (Ú1 - \2Ì1)Å(0) = 0, (a(1) - \2Ú(1))Å"(1) + (Ú2 - \2Ì2)Å(I) = 0. (4) Siamo così arrivati al problema di Sturm-Liouville, che differisce da quello classico in quanto il parametro spettrale A è incluso nel coefficiente della derivata più alta dell'equazione, nonché nelle condizioni al contorno. Questa circostanza non ci permette di fare riferimento a risultati noti dalla letteratura, quindi il nostro obiettivo immediato è studiare il problema (3), (4). Per implementare con successo il metodo di separazione delle variabili, abbiamo bisogno di informazioni sull'esistenza e sulla posizione degli autovalori, sulla qualità proprietà delle autofunzioni: hanno la proprietà di ortogonalità? Mostriamo che A2 > 0. Supponiamo che non sia così. Sia X(x) l'autofunzione del problema (3), (4), corrispondente al valore A = 0. Moltiplicare (3) per X(x) e integrare l'uguaglianza risultante sull'intervallo (0,1). Integrando per parti e applicando le condizioni al contorno (4), dopo trasformazioni elementari si ottiene 1(0) - L2Ú(0))(a(1) - L2Ú(1)) I (dX2 + bX"2)yx+ N\X2(0) + M2X2(1) I aX"2<1х + К\Х2(0) + К2Х2(1). Jo Si noti che dal significato fisico le funzioni a(x), b(x), d(x) sono positive, Kr, Mg sono non negative. Ma allora dall'uguaglianza risultante segue che X"(x) = 0, X(0) = X(1) = 0, quindi X(x) = 0, il che contraddice l'ipotesi fatta. Di conseguenza, l'ipotesi che quello zero è l'autovalore del problema (3), (4) non è corretto. La rappresentazione della soluzione dell'equazione (3) dipende dal segno dell'espressione a(x) - - A2b(x). Mostriamo che a(x) - A2b(x) > 0 Vx e (0.1). Fissiamo arbitrariamente x e (0,1) e troviamo a questo punto i valori delle funzioni a(x), b(x), d(x). Scriviamo l'equazione (3) nella forma X"(x) + VX(x) = 0, (5) dove abbiamo designato nel punto fisso selezionato e scriviamo le condizioni (4) nella forma Х"(0) - аХ (0) = 0, Х"(1) + вХ (I) = 0, (6) dove a, b sono facili da calcolare. Come è noto, il classico problema di Sturm-Liouville (5), (6) ha un insieme numerabile di autofunzioni per V > 0, da cui, poiché x è arbitrario, segue la disuguaglianza richiesta. Le autofunzioni del problema (3), (4) hanno la proprietà di ortogonalità con il carico espresso dalla relazione I (dХт(х)Хп(х) + БХ"т(х)Х"п(х))<х+ ■)о M1Xt(0)Xn(0) + M2Xt(1)Xn (I) = 0, (7) che può essere ottenuto in modo standard (vedi, ad esempio,), la cui implementazione nel caso del problema in esame è associata a calcoli elementari ma minuziosi. Presentiamo brevemente la sua derivazione, omettendo l'argomento delle funzioni Xr(x) per evitare complessità. Siano Am, An autovalori diversi, Xm, Xn le corrispondenti autofunzioni del problema (3), (4). Poi ((a - L2tb)X"t)" + L2tdXt = 0, ((a - L2pb)X"p)" + L2pdXp = 0. Moltiplichiamo la prima di queste equazioni per Xn, la seconda per Xm e sottraiamo la seconda dalla prima. Dopo trasformazioni elementari otteniamo l'uguaglianza (Lt - Lp)YХtХп = (аХтХП)" - ЛП(БХтХ"п)" - (аХ"тХп)" + Lt(БХтХп)", che integriamo nell'intervallo (0,1). Di conseguenza, tenendo conto della (4) e riducendo di (Lm - Ln), otteniamo la relazione (7). Le affermazioni comprovate sulle proprietà degli autovalori e delle autofunzioni del problema di Sturm-Liouville (3), (4) consentono di applicare il metodo di separazione delle variabili per trovare una soluzione al problema. 3. Risolvibilità del problema. Denotiamo C(ST) = (u: u e C(St) P C2(St), uikh e C^t)). Teorema 1. Sia a, b e C1, d e C. Allora esiste al più una soluzione u e C^t) del problema (1), (2). Prova. Supponiamo che esistano due diverse soluzioni del problema (1), (2), u1(x,z) e u2(x,z). Allora, data la linearità del problema, la loro differenza u = u1 - u2 è una soluzione del problema omogeneo corrispondente a (1), (2). Mostriamo che la sua soluzione è banale. Notiamo innanzitutto che dal significato fisico dei coefficienti dell'equazione e delle condizioni al contorno, le funzioni a, b, d sono positive ovunque in Qm, e M^, K^ sono non negative. Moltiplicando l'uguaglianza (1) per u e integrando sulla regione Qt, dove te e è arbitrario, dopo semplici trasformazioni otteniamo / (di2(x,t) + ai2x(x,t) + biHl(x,t))yx+ ./o K1u2(0, t) + M1u2(0, t) + K2u2(1, t) + M2u2(1, t) = 0, da cui, per l'arbitrarietà di m, segue immediatamente la validità del teorema. □ Dimostreremo l'esistenza di una soluzione per il caso di coefficienti costanti. Teorema 2. Sia<р е С2, <р(0) = <р(1) = (0) = ц>"(\) = 0, ha una derivata continua a tratti del terzo ordine in (0.1), φ ε 1, φ(0) = φ(1) = 0 e ha una derivata continua a tratti del secondo ordine in (0.1) , f e C(C^m), allora una soluzione del problema (1), (2) esiste e può essere ottenuta come somma di una serie di autofunzioni. Prova. Come al solito, cercheremo una soluzione al problema sotto forma di somma dove il primo termine è la soluzione del problema posto per un'equazione omogenea corrispondente a (1), il secondo è la soluzione dell'equazione (1), che soddisfa le condizioni iniziali e al contorno pari a zero. Utilizziamo i risultati della ricerca effettuata nel paragrafo precedente e scriviamo la soluzione generale dell'equazione (3): X(x) = Cr cos A J-+ C2 sin Aw-^rrx. \¡ a - A2b \¡ a - A2b Applicando le condizioni al contorno (4), arriviamo a un sistema di equazioni per Cj! (a - A2b)c2 - (Ki - A2Mi)ci = 0, (-A(a - A2b) sin Ayja-A¡bl + (K - A2M2) cos A^O-A^l) ci+ Uguagliando il suo determinante a zero, otteniamo l'equazione spettrale ctg= (a - A4)A2" - (K - A?Mí)(K2 - A"M). (8) b Va - A2b A^q(a - A2b)(Ki + K2 - A2(Mi + M2)) Vediamo se questa equazione trascendente ha una soluzione. Per fare ciò, considera le funzioni sui lati sinistro e destro ed esamina il loro comportamento. Senza limitare troppo la generalità, mettiamo Mi = M2 = M, Kg = K2 = K, il che semplificherà leggermente i calcoli necessari. L'equazione (8) assume la forma x I q , Aja - A2b Jq K - A2M ctg A\Z-^l = a - A2b 2(K - A2M) 2A^^0-A2b" Indichiamo e scrivi l'equazione spettrale in una nuova notazione! aqlß Kql2 + ß2 (Kb - aM) 2Kql2 + 2^2(Kb - aM) 2/j.aql L'analisi delle funzioni dei membri sinistro e destro dell'ultima equazione ci consente di affermare che esiste un insieme numerabile delle sue radici e, quindi, un insieme numerabile di autofunzioni del problema di Sturm-Liouville (3), (4), che, tenendo conto della relazione ottenuta dal sistema rispetto a c3, può essere scritta v / l l I q K - x14:00. l io q Xn(x) = COS XnJ-gutx + ----sin XnJ-gutX. V a - A2b AnVa - ftb^q V a - A2b Passiamo ora alla ricerca di una soluzione che soddisfi anche le condizioni iniziali. Ora possiamo trovare facilmente la soluzione del problema per un'equazione omogenea sotto forma di serie u(x,t) = ^ Tn(t)Xn(x), i cui coefficienti possono essere ricavati dai dati iniziali, utilizzando la proprietà di ortogonalità delle funzioni Xn(x), la cui norma può essere ottenuta dalla relazione (7): ||X||2 = f (qX2 + bX%)dx + MiX2(0) + M2x2(l). ■Jo Anche il processo per trovare la funzione v(x,t) è essenzialmente standard, ma notiamo comunque che, cercando una soluzione nella forma tradizionale v(x,t) = ^ Tn(t)Xn(x), otteniamo due equazioni. Infatti, tenendo conto del tipo di autofunzioni, chiariamo la struttura della serie nella forma di cui stiamo cercando una soluzione: j(x,t) = ^ (Vn(t)cos Xn^J a b x+ Wn(t) K-XnM~ sin X^HAarx). (9) v JXnVa - xnb^q V a - xn " Per soddisfare le condizioni iniziali zero y(x, 0) = y^x, 0) = 0, richiediamo che Vn(0) = Vn(0) = 0, Wn(0) = W(0) = 0. f( x,r) nella serie di Fourier in termini delle autofunzioni Xn(x), troviamo i coefficienti ¡n(b) e dn(b). Sostituendo la (9) nell'equazione (1), scritta rispetto a y(x, b), dopo una serie di trasformazioni otteniamo le equazioni per trovare Yn(b) e Wn(b): yts® + >&pYu = ™ + xn Wn (<) = Xn (-a-iKrW g Tenendo conto delle condizioni iniziali Vn(0) = Y, (0) = 0, Wn(0) = W, (0) = 0, arriviamo ai problemi di Cauchy per ciascuna delle funzioni Vn(b) e Wn( b), la cui unica risolvibilità è garantita dalle condizioni del teorema. Le proprietà dei dati iniziali formulati nel teorema non lasciano dubbi sulla convergenza di tutte le serie emerse nel corso della nostra ricerca e, quindi, sull'esistenza di una soluzione al problema posto. □ Conclusione. Si dimostra l'esistenza di un sistema di autofunzioni del problema in studio, ortogonale al carico, e se ne ottiene la rappresentazione. Le proprietà accertate delle autofunzioni hanno permesso di dimostrare l'esistenza di una soluzione unica al problema posto. Si noti che i risultati ottenuti nell'articolo possono essere utilizzati sia per ulteriori studi teorici di problemi con condizioni al contorno dinamiche, sia per scopi pratici, vale a dire per il calcolo delle vibrazioni longitudinali di un'ampia gamma di oggetti tecnici. Aleksandr Borisovič Beilin: http://orcid.org/0000-0002-4042-2860 ELENCO BIBLIOGRAFICO 1. Nerubay M. S., Shtrikov B. L., Kalashnikov V. V. Lavorazione e assemblaggio ad ultrasuoni. Samara: Casa editrice del libro Samara, 1995. 191 p. 2. Khmelev V.N., Barsukov R.V., Tsyganok S.N. Elaborazione dimensionale ad ultrasuoni dei materiali. Barnaul: Università Tecnica di Altai dal nome. I.I. Polzunova, 1997. 120 pag. 3. Kumabe D. Taglio con vibrazione. M.: Ingegneria Meccanica, 1985. 424 p. 4. Tikhonov A. N., Samarsky A. A. Equazioni di fisica matematica. M.: Nauka, 2004. 798 p. 5. Strett J.V. Teoria del suono. T. 1. M.: GITTL, 1955. 504 p. 6. Rao J. S. Teoria avanzata delle vibrazioni: vibrazioni non lineari e strutture unidimensionali. New York: John Wiley & Sons, Inc., 1992. 431 pp. 7. Fedotov I. A., Polyanin A. D., Shatalov M. Yu. Teoria delle vibrazioni libere e forzate di un'asta solida basata sul modello di Rayleigh // DAN, 2007. T. 417, n. 1. pp. 56-61. 8. Bazant Z., Jirasek M. Formulazioni integrali non locali di plasticità e danno: indagine sui progressi // J. Eng. Mech., 2002. vol.128, n. 11. pag. 1119-1149. doi: 10.1061/(ASCE)0733-9399(2002)128:11(1119). 9. Beilin A. B., Pulkina L. S. Problema delle vibrazioni longitudinali di un'asta con condizioni al contorno dinamiche // Vestn. SamSU. Scienze naturali ser., 2014. N. 3(114). pp. 9-19. 10. Korpusov M. O. Distruzione in equazioni d'onda non classiche. M.: URSS, 2010. 237 p. Ricevuto dalla redazione il 10/II/2016; nella versione finale - 18/V/2016; accettato per la pubblicazione - 27/V/2016. Vestn. Samar. Va. Tecn. Un-ta. Ser. Fiz.-mat. nauki 2016, vol. 20, n. 2, pagg. 249-258 ISSN: 2310-7081 (online), 1991-8615 (stampato) doi: http://dx.doi.org/10.14498/vsgtu1474 MSC: 35L35, 35Q74 UN PROBLEMA SULLA VIBRAZIONE LONGITUDINALE DI UNA BARRA CON FISSAGGIO ELASTICO Università tecnica statale di Samara, 244, Molodogvardeyskaya st., Samara, 443100, Federazione Russa. In questo articolo studiamo la vibrazione longitudinale in una barra corta e spessa fissata da forze puntuali e molle. Per il modello matematico consideriamo un problema ai valori al contorno con condizioni al contorno dinamiche per un'equazione alle derivate parziali del quarto ordine. La scelta di questo modello dipende dalla necessità di tenere conto del risultato di una deformazione trasversale. Rayleigh ha dimostrato che trascurare una deformazione trasversale porta ad un errore. Ciò è confermato dalla moderna teoria non locale della vibrazione. Dimostriamo l'esistenza di autofunzioni ortogonali con carico e ne ricaviamo la rappresentazione. Le proprietà stabilite delle autofunzioni rendono possibile l'utilizzo del metodo di separazione delle variabili e la ricerca di una soluzione unica del problema. Parole chiave: condizioni dinamiche al contorno, vibrazione longitudinale, ortogonalità caricata, modello di Rayleigh. Alexander B. Beylin: http://orcid.org/0000-0002-4042-2860 1. Nerubai M. S., Shtrikov B. L., Kalashnikov V. V. Ul "trazvukovaia mekhanicheskaia obrabotka i sborka. Samara, Samara Book Publ., 1995, 191 pp. (in russo) 2. Khmelev V. N., Barsukov R. V., Tsyganok S. N. Ul "trazvukovaia razmernaia obrabotka materialov. Barnaul, 1997, 120 pp. (in russo) 3. Kumabe J. Taglio con vibrazione. Tokyo, Jikkyou Publishing Co., Ltd., 1979 (in giapponese). 4. Tikhonov A. N., Samarsky A. A. Uravneniia matematicheskoi fiziki. Mosca, Nauka, 2004, 798 pp. (In russo) 5. Strutt J. W. La teoria del suono, vol. 1. Londra, Macmillan e Co., 1945, xi+326 pp. 6. Rao J. S. Teoria avanzata delle vibrazioni: vibrazioni non lineari e strutture unidimensionali. New York, John Wiley & Sons, Inc., 1992, 431 pp. Beylin A.B. Un problema sulla vibrazione longitudinale di una barra con fissaggio elastico, Vestn. Samar. Va. Tecn. Univ., Ser. Fiz.-Mat. Nauki, 2016, vol. 20, n. 2, pagg. 249-258. doi: 10.14498/vsgtu1474. (In russo) Dettagli dell'autore: Alexander B. Beylin (Cand. Techn. Sci.; [e-mail protetta]), Professore Associato, Dip. di macchine utensili e sistemi di automazione. 7. Fedotov I. A., Polyanin A. D., Shatalov M. Yu. Teoria delle vibrazioni libere e forzate di un'asta rigida basata sul modello di Rayleigh, Dokl. Fisica, 2007, vol.52, n. 11, pag. 607-612. doi: 10.1134/S1028335807110080. 8. Bazant Z., Jirasek M. Formulazioni integrali non locali di plasticità e danno: indagine sui progressi, J. Eng. Mech., 2002, vol.128, n. 11, pag. 1119-1149. doi: 10.1061/(ASCE)0733-9399(2002)128:11(1119). 9. Beylin A. B., Pulkina L. S. Un problema sulle vibrazioni longitudinali di un'asta con condizioni al contorno dinamiche, Vestnik SamGU. Estestvenno-Nauchnaya Ser., 2014, n. 3(114), pp. 919 (in russo). 10. Korpusov M. O. Razrushenie v neklassicheskikh volnovykh uravneniiakh. Mosca, URSS, 2010, 237 pp. (In russo) Ricevuto il 10/II/2016; ricevuto in forma riveduta il 18/V/2016;6.1. Vibrazioni longitudinali delle aste
![]() ,(173)
,(173)![]() ,
,![]() .(179)
.(179)![]() ,(180)
,(180)![]() ,(181)
,(181)![]() .
.![]() , Se .
, Se .![]() , dove C o è la rigidità del supporto. Tenendo conto della (183) per la forza longitudinale, otteniamo la condizione al contorno
, dove C o è la rigidità del supporto. Tenendo conto della (183) per la forza longitudinale, otteniamo la condizione al contorno
![]() .
.![]() ,
,![]() , (184)
, (184)![]() (n=1,2,...)
(n=1,2,...)![]() (n=1,2,…).(185)
(n=1,2,…).(185)![]() .
.![]() in x= .
in x= .![]() .
.![]() .
. .
.![]() .
.6.2. Vibrazioni torsionali degli alberi

![]() ,
,![]() .
.![]() , (187)
, (187)![]() ,
,![]() (188)
(188)![]() (Jo è il momento d'inerzia del disco rispetto all'asse dell'asta);
(Jo è il momento d'inerzia del disco rispetto all'asse dell'asta);![]() .
.![]() (n=1,2,…).
(n=1,2,…).![]() .
.![]() ,
, .
.
6.3.Vibrazioni flessionali delle travi
6.3.1 Equazione base
 .(191)
.(191) .
.![]() .(192)
.(192)![]() .
.![]() .(195)
.(195) (198)
(198) (200)
(200)![]() .(201)
.(201)6.3.2. Condizioni di confine

![]() può essere scritto utilizzando l'equazione (194) come segue: ; deve essere uguale alla forza di taglioQ=EJX"""T, quindi le condizioni al contorno assumono la forma
può essere scritto utilizzando l'equazione (194) come segue: ; deve essere uguale alla forza di taglioQ=EJX"""T, quindi le condizioni al contorno assumono la forma![]() ; X""=0 .(205)
; X""=0 .(205)![]() (C o - coefficiente di rigidità del supporto).
(C o - coefficiente di rigidità del supporto).6.3.3. Equazione della frequenza e autoforme

![]() .
.![]() .
.![]() .(208)
.(208)![]() .
.
![]() ,(209)
,(209)6.3.4. Determinazione del movimento in base alle condizioni iniziali
 (210)
(210)![]() .
.![]() .(211)
.(211)![]() .(212)
.(212)![]()
![]() .
. (213)
(213) (214)
(214)
6.3.5. Effetto della forza longitudinale costante
![]() .
.
![]() .(215)
.(215)


![]() Dare . Soddisfando le stesse condizioni all'estremità destra, otteniamo
Dare . Soddisfando le stesse condizioni all'estremità destra, otteniamo
 .
. .(219)
.(219)6.3.6. Effetto delle forze a catena
![]() .
.![]() .
.![]() .(220)
.(220)![]() ,(221)
,(221)![]() ,(222)
,(222)![]() ;.
;.![]() .
.6.4. Effetto dell'attrito viscoso
![]() ;
;![]() .(223)
.(223)
![]() ,(225)
,(225)![]() ,(226)
,(226)![]() ,(227)
,(227)![]() , arriviamo all'uguaglianza
, arriviamo all'uguaglianza ,(228)
,(228)![]() (229)
(229)![]() .(230)
.(230) .(233)
.(233)![]() .(234)
.(234)![]() ,(235)
,(235)
 (236)
(236)6.5. Vibrazioni delle barre a sezione variabile
![]() .(238)
.(238)![]() ,(239)
,(239) .(240)
.(240)
![]() (5.2)
(5.2)![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Onde sonore
Onde trasversali